Automatización de Precisión
RC-260 Alimentador CNC e Inspección:
Introducción
El robot de alimentación e inspección CNC RC-260 es un sistema robótico de seis ejes de última generación, diseñado para automatizar la manipulación de piezas y la inspección de calidad en procesos de mecanizado CNC. Equipado con pinzas dobles, el robot toma piezas en bruto desde una pista vibratoria en línea y las carga en la máquina CNC. Una vez finalizado el mecanizado, retira la pieza terminada, la reemplaza por una nueva pieza en bruto y luego procede a limpiar e inspeccionar el componente antes de enviarlo al siguiente proceso.
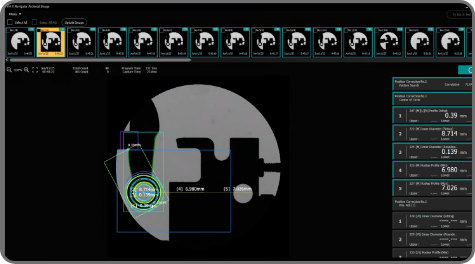
El sistema incorpora una celda de inspección con un dispositivo de medición de alta precisión, capaz de medir características críticas con exactitud de hasta 1.5 micras. Para garantizar la máxima precisión, la pieza debe estar orientada perpendicularmente a la cámara del sistema de visión. Además de las mediciones dimensionales, una cámara secundaria inspecciona un orificio de aceite de 1 mm para asegurar que no esté obstruido. Esta inspección requiere una fuente de luz interna especializada dentro de la pieza para iluminar el orificio y permitir una visualización clara.
.png)
.png)
.png)
Desafíos
Durante el desarrollo e implementación del sistema RC-260 se enfrentaron varios desafíos técnicos:
• Orientación precisa de la pieza:
La repetibilidad de posicionamiento del robot es de aproximadamente 40 micras, lo que dificulta mantener la pieza perfectamente perpendicular a la cámara de inspección para mediciones precisas.
• Limpieza efectiva de la pieza:
Después del mecanizado, es necesario eliminar el exceso de refrigerante sin afectar la manipulación, lo que requiere la integración de múltiples boquillas de aire en la trayectoria del robot.
• Iluminación del orificio de aceite:
El eje del orificio de aceite no coincide con el centro del diámetro interno de la pieza, lo que exige una fuente de luz personalizada capaz de iluminar de manera confiable el interior del orificio para su inspección.
Enfoque Experimental y Resultados
1. Posicionamiento fijo del robot
Inicialmente, se intentó encontrar una posición fija del robot que garantizara una orientación perpendicular constante de las piezas respecto a la cámara. Utilizando una pieza patrón con dimensiones internas conocidas, se probaron diferentes ángulos para maximizar la medición del diámetro. Sin embargo, la variabilidad en el punto de sujeción provocó orientaciones inconsistentes, haciendo que este método fuera poco fiable.
2. Ajuste dinámico del ángulo por pieza
Se implementó un enfoque donde el robot ajustaba dinámicamente el ángulo de cada pieza. La pieza se rotaba entre -1.0° y +1.0° en incrementos de 0.1° en los planos XY y XZ, registrando mediciones en tiempo real. La orientación óptima se definía donde las mediciones alcanzaban su valor máximo.
Aunque prometedor, este método generaba inconsistencias frente a datos de CMM y un tiempo de ciclo elevado (7–10 segundos), superior al objetivo (2–3 segundos).
3. Optimización del tiempo de ciclo con algoritmo
Para reducir el tiempo, se desarrolló un algoritmo que predice la orientación óptima utilizando menos muestras (3–4 ángulos) e interpolación. Esto mejoró el tiempo de inspección, pero persistieron variaciones en las mediciones debido a la posición de la pieza.
4. Solución con fijación mecánica (fixture)
Finalmente, se implementó una solución basada en un fixture de alta precisión con un pin de orientación. Este sistema alinea la pieza de forma perpendicular a la cámara independientemente de la posición del robot, garantizando repetibilidad.
El principal reto fue asegurar que el fixture estuviera perfectamente alineado con el eje de la cámara. Una vez logrado, los resultados coincidieron estrechamente con los datos de CMM, alcanzando máxima precisión y consistencia.
Conclusión
El RC-260 demuestra una integración avanzada de robótica, inspección de precisión y automatización. Superar los desafíos de orientación y limpieza permitió desarrollar una solución robusta capaz de ofrecer mediciones a nivel micrométrico en entornos de alta producción.
Al combinar robótica adaptativa, fijaciones de precisión y técnicas de iluminación innovadoras, el sistema mejora significativamente el control de calidad en procesos CNC, reduce la inspección manual y aumenta la eficiencia general de manufactura.