Precision Automation for Advanced Part Handling and Quality Control
RC-260 CNC Feeder and Inspection:
Introduction
The RC-260 CNC Feeder and Inspection Robot is a cutting-edge six-axis robotic system designed to automate part handling and quality inspection in CNC machining workflows. Equipped with dual gripper end-effectors, the robot picks raw parts from an inline vibratory track and loads them into a CNC machine. Upon completion of machining, it retrieves the finished part, replaces it with a new raw piece, then proceeds to clean and inspect the machined component before passing it along for further processing.
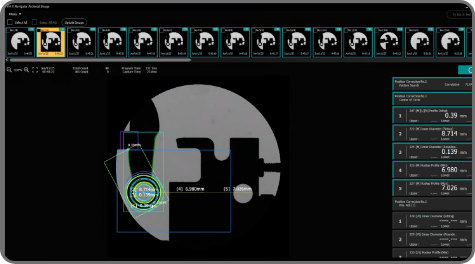
The system incorporates an inspection cell featuring a high-accuracy measurement device capable of measuring critical features with precision down to 1.5 microns. For optimal measurement accuracy, the part must be precisely oriented perpendicular to the vision system’s camera. In addition to dimensional checks, a secondary camera inspects a 1mm oil hole to ensure it is unobstructed. This inspection requires a specialized internal light source within the part to illuminate the oil hole for clear visualization.
.png)
.png)
.png)
Challenges
Several technical challenges were encountered during the development and deployment of the RC-260 system:
• Achieving Precise Part Orientation: The robot’s positioning repeatability is limited to approximately 40 microns, making it difficult to hold parts perfectly perpendicular to the inspection camera for accurate measurements.
• Effective Part Cleaning: After machining, excess coolant water needs to be removed without disrupting part handling, requiring a series of air nozzles integrated into the robot’s path.
• Illumination of the Oil Hole: The oil hole’s axis does not intersect the center of the part’s inner diameter, necessitating a custom-designed light source capable of reliably illuminating the hole’s interior for inspection.
.png)

Experimental Approach and Findings
1. Fixed Robot Positioning
Initially, efforts focused on finding a fixed robot position that would consistently orient parts perpendicular to the camera. Using a golden reference part with known inner diameter (ID) dimensions, various fixed angles were tested to maximize the measured diameter. However, variability in the part’s gripping location caused inconsistent orientations part-to-part, making this approach unreliable.
2. Dynamic Angle Adjustment Per Part
The next approach involved dynamically adjusting the robot’s angle for each part. The robot would hold the part in front of the camera, rotate through a range of -1.0° to +1.0° in 0.1° increments in two planes (XY and XZ), and record live measurements of the ID. The optimal orientation was identified where measurements peaked in both planes, defining the “perpendicular” position for final imaging.
While promising, this method still produced measurement inconsistencies compared to Coordinate Measuring Machine (CMM) data. Moreover, the imaging cycle time of 7-10 seconds exceeded the target of 2-3 seconds, impacting throughput.
3. Cycle Time Optimization with Algorithmic Angle Prediction
To reduce cycle time, an algorithm was developed to predict the optimal orientation by sampling fewer angles (3-4) and interpolating the maximum measurement position, cutting the image acquisition time significantly. Despite cycle time improvements, measurement variability persisted due to part positioning and floating reference points.
4. Fixture-Based Orientation Solution
Ultimately, a new technique was implemented where the robot places each part into a precision-engineered fixture containing an orienting pin. This fixture aligns the part perpendicular to the camera regardless of the robot’s approach angle, providing consistent and repeatable positioning.
The primary challenge was ensuring the fixture itself was machined and mounted precisely perpendicular to the camera axis. Once achieved, this method produced measurement results closely matching CMM data, delivering the highest accuracy and consistency.
Conclusion
The RC-260 CNC Feeder and Inspection Robot exemplifies advanced integration of robotics, precision inspection, and automation engineering. Overcoming key challenges in part orientation and cleaning led to a robust solution capable of delivering micron-level measurement accuracy in a high-throughput manufacturing environment.
By combining adaptive robotics with precision fixtures and innovative lighting techniques, the RC-260 system significantly enhances quality control in CNC machining operations, reduces manual inspection labor, and improves overall manufacturing efficiency.